 济南海马机械设计有限公司
济南海马机械设计有限公司
不论是3轴还是6轴的机械手,采用的都是交流伺服电机,并且都是带刹车的。编码器一般都是绝对值的。不是绝对值的电机,每次停机后存在一个回零的问题。
早期进口的ABB的机械手大都用他们自己制造的齿轮机构减速。
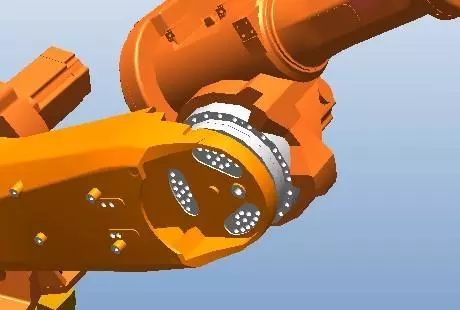
6轴工业机器人的1、2、3轴用的都是RV减速机,属于摆线针轮结构。4、5、6轴一般采用谐波减速机。由于轴承是特制的,这种摆线针轮的RV减速机轴向尺寸很短。国内用的比较多的是日本人帝人公司的这种减速机。轴向尺寸比较短的伺服电机有日本的发那科,国内广州数控也有专门为他们自己公司工业机器人配套的伺服电机,较他们传统的伺服电机轴向尺寸短很多。

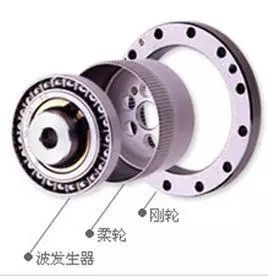

1.承载能力高 谐波传动中,齿与齿的啮合是面接触,加上同时啮合齿数(重叠系数)比较多,因而单位面积载荷小,承载能力较其他传动形式高。
2.传动比大 单级谐波齿轮传动的传动比,可达 i=70~500。
3.体积小、重量轻。
4.传动效率高、寿命长。
5.传动平稳、无冲击,无噪音,运动精度高。
6.由于柔轮承受较大的交变载荷,因而对柔轮材料的抗疲劳强度、加工和热处理要求较高,工艺复杂。
谐波减速器在国内于六七十年代才开始研制,已有不少厂家专门生产,并形成系列化。广泛应用于电子、航天航空、机器人等行业,由于它的独特优点,在化工行业的应用也逐渐增多。

上一篇: 浅谈机械设计思路,听完感触很深啊
下一篇: 焊缝余高的作用与危害